Sebuah Saran Untuk Belajar Robot
Lintang Erlangga - August 2nd, 2021

Memang gak ada salahnya setiap orang belajar sesuatu yang mutakhir, tapi saya menganjurkan untuk bersabar dahulu dan coba pelajari hal-hal yang mendasar. Alasan pertama, karena hal yang mendasar itu bisa membantu kita memahami sesuatu yang lebih advanced. Kemudian yang kedua, tak jarang beberapa cabang di robotika memang memerlukan prerequisites terlebih dahulu. Sebagai contoh, konsep probabilistic robotics untuk sistem posisi robot memerlukan pemahaman setidaknya materi-materi peluang. Implementasi kinematika robot setidaknya paham tentang dasar-dasar dari aljabar linear, dan masih ada lagi sebenarnya.
Nah untuk kali ini kita sebenarnya gak akan banyak belajar banyak hal mengenai teoritikal yang disebutkan sebelumnya, melainkan lebih ke prinsip kerja robotika secara umum (gak umum banget sih sebenarnya).
Daftar Isi
Bagian besar robotika
Jadi kalau versi saya, di dalam robotika ada tiga bagian atau komponen utama yaitu elektronik, mekanik, dan pemrograman.
Elektronik
Suatu robot perlu mengetahui kondisi lingkungan sekitar jika ingin bekerja dengan baik (salah satunya supaya safety), juga perlu melakukan perhitungan dalam pengambilan keputusan dan aksinya. Dan hal-hal tersebut bisa dikatakan sebagai fungsi utama dari komponen elektronik. Komponen elektronik yang digunakan untuk mengetahui kondisi sekitar disebut sebagai sensor, dan jenisnya ada banyak macam, seperti sensor jarak, sensor suhu, sensor citra (kamera), sensor cahaya, dan masih banyak lagi. Dari namanya mungkin kalian sudah bisa menebak fungsinya apa aja ya, sensor jarak ya pastinya mengukur jarak, sensor cahaya untuk mendeteksi cahaya, dan sebagainya.
Kalau di pasaran, sensor jarak itu umunya ada HCSR-04 untuk yang versi yang murah dan ada SRF-05, untuk sensor cahaya umumnya dan yang pernah saya pakai yaitu LM35, kalau kamera biasanya pakai webcam, dan sensor cahaya pakai photo diode.
Itu untuk sensor, nah untuk melakukan perhitungannya kita menggunakan alat yang namanya mikroprosesor. Kalau untuk belajar saya saranin pakkai mikrokontroler aja dulu seperti ATmega32, dan sejenisnya. Soalnya kalau mikrokontroler itu udah ada peripheral-nya, sederhananya input-output dari mikrokontroler itu udah bisa langsung digunakan untuk menjadi perintah karena umumnya keluarannya udah 5V. Berbeda dengan mikroprosesor yang rata-rata masih 3.3V.
Apabila mau yang lebih sederhana lagi, bisa gunakan Arduino. Semuanya udah ada dan tinggal pakai pokoknya kalau pakai Arduino, kalau mau proyekan bisa langsung ngehubungi komponen-komponen yang dipakai. Mengingat mikrokontroler itu perlu yang namanya sistem minimum, jadi kita perlu merangkai lagi power supply-nya, membuat osilator, dan membuat ekstensi yang menghubungkan kaki-kaki pin mikrokontroler. Dengan Arduino semuanya gak perlu kalian lakukan lagi (kok jadi kayak promosi ya).
Lalu kemampuan apa saja yang perlu dimiliki?
- Menyolder, ini sudah pasti
- Mengetahui prinsip dasar kelistrikan
- Mendesain skematik
- Rajin-rajin baca datasheet
- Menggunakan CAD atau Computer Aided Design untuk mempermudah proses desain skematik, dan nantinya untuk bikin PCB atau Printed Circuit Board. Contohnya bisa pakai KiCAD dan Eagle (saya pakai yang ini)
Mekanik
Untuk berinteraksi dengan lingkungan atau bisa juga dikatakan untuk mewujudkan aksi yang dimaksud pada pembahasan sebelumnya, kita perlu merubah informasi listrik tersebut menjadi suatu aksi nyata. Hal tersebut dilakukan pada bagian mekanik, selain itu mekanik juga bagian dari mendesain wujud atau model robot yang akan dibuat. Dalam istilah mekanik ada yang disebut sebagai aktuator yang fungsinya untuk melakukan gerakan. Ada banyak macam aktuator, di antaranya motor listrik (umumnya motor DC), servo, dan pneumatik. Servo sendiri sebenarnnya motor DC, hanya saja ada umpan balik atau feedback sehingga servo itu bisa dikatakan sebagai motor listrik yang terkontrol (menurut saya ini mah).
Untuk produknya secara spesifik, sebenarnya banyak banget motor listrik ini, tapi secara umum bisa kita klasifikasikan berdasarkan tegangan kerjanya. Maksudnya seperti motor 5V, 12V hingga 24V, kemudian bisa juga berdasarkan RPM atau rotation per minute-nya, dan kekuatan torsinya.
Kemudian untuk servo umumnya untuk proyek kecil-kecilan (budget-nya) bisa pakai Tower Pro SG 90, harganya bener-bener murah pokoknya.
Nah untuk desainnya, sebenarnya saya bukan ahli ngedesain mekanik untuk robot, tapi saya saat baru belajar bikin robot biasanya bikin menggunakan CAD vektor, seperti Corel Draw. Jadi kalau pakai CAD vektor, kita ngebayangin suatu desain 3D di buat menjadi bagian-bagian 2D. Tapi kalau saya lihat teman-teman saya yang mekanik mereka banyak yang menggunakan aplikasi Inventor.
Kemampuan yang diperlukan (versi anak Elektro)
- Mempertimbangkan user experience
- Mengetahui dampak desain yang dibuat
- Bisa menggunakan CAD
Pemrograman
Wujudnya udah ada, rangkaian elektroniknya udah ada, tapi robotnya belum bisa bekerja sesuai yang diinginkan? Ini dia tugas dari program atau kode yang akan dibuat. Jadi bagian pemrograman itu bertugas untuk membuat si robot bertindak seperti apa yang kita mau. Peralatan-peralatan yang diperlukan cukup menggunakan editor, compiler, dan downloader. Untuk mikroprosesor yang berbeda memerlukan library yang berbeda tapi umumnya bahasa pemrograman yang digunakan yaitu bahasa C.
Biasanya beberapa bagian penting yang perlu dipersiapkan pada pemrograman yaitu menyesuaikan clock rate yang dipakai, mengatur pin-pin mana saja yang menjadi input dan output. Terus pin-pin tersebut juga bisa diatur apakah masukan dan keluarannya berupa analog, kemudian mengatur timer.
Sebenarnya kalau secara garis besar, pemrograman yang dibuat itu bertujuan memanipulasi pin-pin pada mikrokontroler sedemikian rupa sehingga tugas yang kita inginkan tercapai.
Setelah program yang kita buat sudah dirasa oke, barulah kalian bisa melakukan kompilasi. Hasil kompiasinya yang biasanya berupa file dengan ekstensi hex, barulah kita masukkkan ke mikrokontroler menggunakan downloader. Umumnya orang menggunakan USB-ASP untuk hardware-nya, dan avrdude untuk aplikasinya. Kalau kalian pakai Arduino gak perlu repot-repot, tinggal koneksiin ke komputer terus langsung upload.
Beberapa kemampuan yang perlu dimiliki
- Membayangkan masalah, kemudian menerjemahkan solusi berdasarkan logika kita menjadi barisan kode
- Paham bahasa pemrograman
- Sabar. Ini saya serius, bikin program itu memerlukan kesabaran, apalagi ketika logika yang kita pakai dirasa sudah benar tapi hasilnya masih salah.
Prinsip kerja robotika
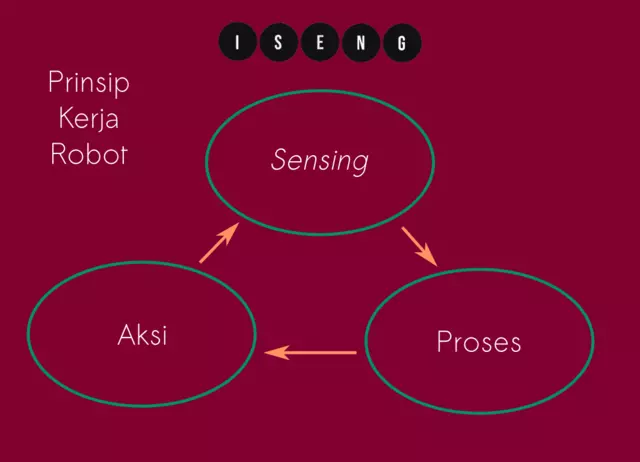
Setelah mengetahui ketiga bagian utama dari robot, kita juga perlu mengetahui bagaimana relasi antara ketiganya. Secara umum, prinsip kerja dari robot ini bisa dibagi menjadi tiga juga, yaitu sensing atau merasakan, proses, kemudian aksi. Hubungan antara ketiganya diilustrasikan pada gambar berikut.
Sensing
Sempat disinggung sebelumnya, kalau ingin melakukan sesuatu maka kita perlu tahu situasi sekitar. Ibaratnya, kita kalau mau berjalan harus sambil mengetahui ada halangan apa saja disekitar. Dan peran utama dari sensing yaitu bagaiamana robot dapat menyesuaikan tugasnya. Seperti contoh, ketika sebuah robot sepakbola mendeteksi bahwa bola sudah dekat, maka hal yang perlu dia lakukan adalah menendang bola ke arah gawang.
Kenapa ini penting? Karena dalam dunia robotik, keselamatan itu merupakan salah satu prioritas utama. Pengalaman saya sendiri pernah kejepit servo untuk robot humanoid, dan rasanya bener-bener sakit banget. Bahkan temen saya ada yang pernah ketabrak robot KRAI (Kontes Robot ABU Indonesia) sampe jalannya pincang.
Ancaman tersebut tidak hanya pada manusia, robot itu sendiri juga kalau pembacaannya sekitarnya gak benar, bisa-bisa membahayai baik itu mekanik ataupun komponen elektroniknya.
Proses
Di sini adalah pusat dari segala pemodelan yang ada, mulai dari desain robot, hingga memodelkan sensor. Gerakkan-gerakkan robot pun diatur dalam bagian ini. Jika ada kesalahan dalam pembacaan sensor, pada bagian ini hanya bisa meminimalisir dampaknya, yaitu dengan membuat filter untuk sensor.
Aksi
Bagi banyak orang, tahapan ini akan menjadi penentu kinerja atau performance robot dalam menjalankan fungsi utamanya. Aksi ini diperintahkan langsung dari tahap sebelumnya berdasarkan hasil perhitungan yang dibuat dikirim menuju hardware semacam servo dan motor.
Memahami bagaimana data dikirim dan "dibungkus" (ke dalam sebuah paket data umumnya) menjadi suatu hal yang wajib kalian ketahui. Untuk yang mendasar, pengetahuan tentang pengiriman data menggunakan komunikasi serial menjadi hal yang gak bisa dilepasin sama anak-anak robotik.
Praktek!
Belajar teori, ikut pelatihan robot di kampus aja gak cukup bro, kalian harus praktekkin langsung ilmu kalian. Alasan yang paling kuat kenapa harus praktek yaitu, karena kenyataannya tidak selalu mulus seperti pada teori atau simulasi. Nanti kalian bakal menemukan ketika robot yang digunakan ternyata punya anomali, misal saja seperti yang pernah saya temui, seperti drop tegangan terutama ketika aktuator sedang digunakan. Ada juga penambahan suatu bilangan yang saya sebut magic number, sesuai namanya bilangan ini tidak tahu asalnya dari mana tapi kalau digunakan sebagai ambang batas ngebantu banget kerja si robot.
Saya sangat menyarankan untuk belajar robot line follower terlebih dahulu, karena jenis robot yang satu ini bisa dikatakan sebagai pintu masuk untuk semua orang yang ingin mempelajari robotika. Robot yang satu ini merupakan salah satu yang mendasar dalam dunia robotika. Buat kalian yang tertarik untuk mempelajari robotika lebih lanjut, saya sarankan coba pelajari dahulu prinsip kerja dari robot line follower.
Saat semester 1 juga saya pernah buat dan kalian bisa akses proyek saya secara lengkap, mulai dari skematik, PCB, mekanik, hingga programmnya di GitHub saya, di https://github.com/koseng-lc/line-follower-Tim-LC. Wujud dari robotnya sendiri sesuai seperti yang ada di cover artikel ini.
Masih banyak lagi yang ingin saya tulis di sini, beberapa pengalaman saya saat belajar tentang robot di semester awal kuliah. Bukan cara yang terbaik tapi semoga saja bisa menjadi gambaran buat teman-teman sekalian untuk merancang cara belajar kalian. Kemudian kalau teman-teman sekalian ada pertanyaan atau mau konsultasi belajar robot coba masukkin komentar aja, semoga saya bisa membantu, terima kasih.


